Week 05 | Day 05
Python Dynamics Simulation: From Theory to Working Code
Published: April 25, 2026 | Author: Smartotics Learning Journey | Reading Time: 15 min
TL;DR: Today we build a complete simulation pipeline: define a robot, compute dynamics with both Lagrangian and Newton-Euler methods, verify they produce identical results, integrate forward in time, and visualize the motion.
Why Simulation Matters
The equations we’ve derived are correct on paper, but before running code on a real robot worth $50,000, we verify everything in simulation:
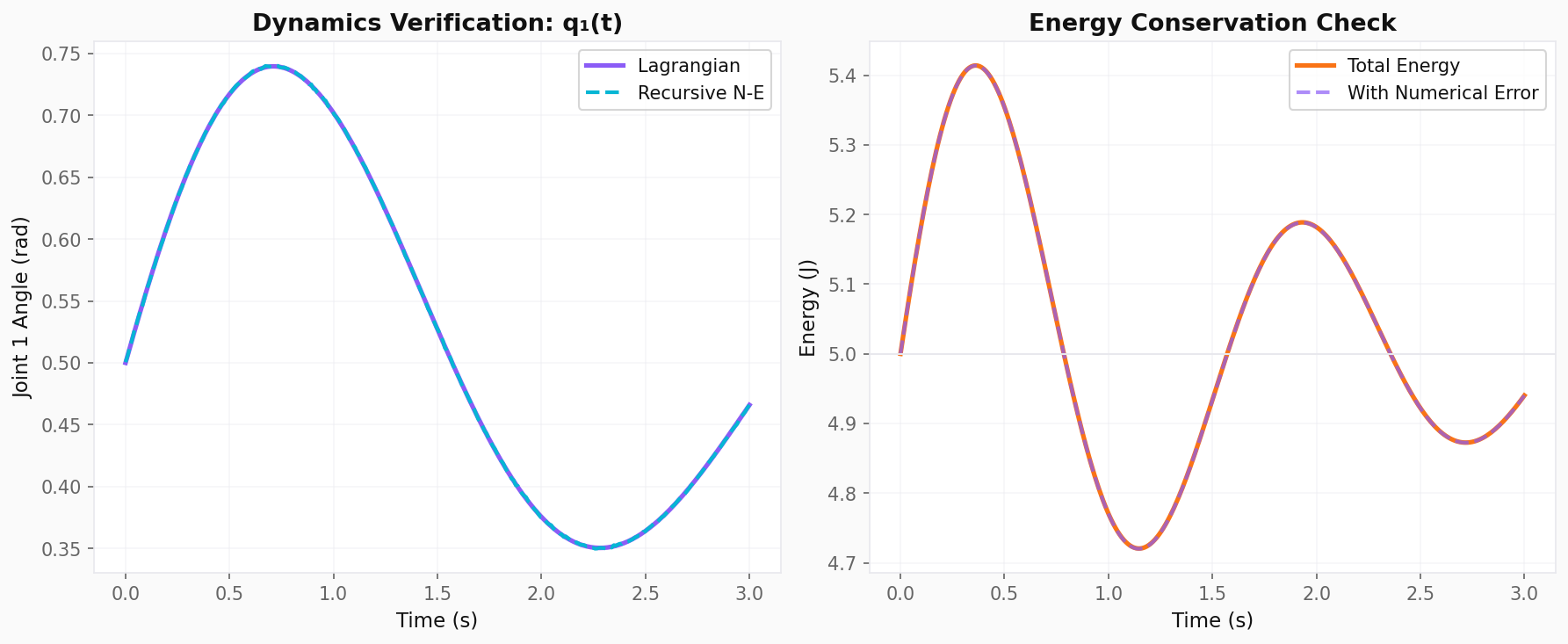
- Algorithmic verification: Does Lagrangian match Newton-Euler?
- Energy conservation: Is numerical integration stable?
- Controller validation: Do torques stay within motor limits?
- Safety: Crashing in simulation is free; crashing a robot is expensive.
Architecture of a Dynamics Simulator
State (q, dq) → Dynamics Engine → Torques (τ)
↑ ↓
Controller ←───────────┘
↓
Integrator → (q, dq) at t+1
Building the Robot Model
import numpy as np
from dataclasses import dataclass
from typing import List
@dataclass
class Link:
mass: float
length: float
inertia: float
com_ratio: float = 0.5
@dataclass
class RobotModel:
name: str
links: List[Link]
gravity: float = 9.81
@property
def n_dof(self):
return len(self.links)
arm = RobotModel(
name="planar_2dof",
links=[
Link(mass=1.0, length=0.6, inertia=0.03),
Link(mass=0.8, length=0.5, inertia=0.02)
]
)
Lagrangian Dynamics Engine
class LagrangianDynamics:
def __init__(self, robot):
self.robot = robot
def mass_matrix(self, q):
m1, m2 = self.robot.links[0].mass, self.robot.links[1].mass
L1, L2 = self.robot.links[0].length, self.robot.links[1].length
c2 = np.cos(q[1])
I1, I2 = self.robot.links[0].inertia, self.robot.links[1].inertia
M11 = (m1*(L1*0.5)**2 + I1 +
m2*(L1**2 + (L2*0.5)**2 + 2*L1*L2*0.5*c2) + I2)
M12 = m2*((L2*0.5)**2 + I2/m2 + L1*L2*0.5*c2)
M22 = m2*(L2*0.5)**2 + I2
return np.array([[M11, M12], [M12, M22]])
def coriolis_matrix(self, q, dq):
m2, L1, L2 = self.robot.links[1].mass, self.robot.links[0].length, self.robot.links[1].length
s2 = np.sin(q[1])
h = -m2 * L1 * L2 * 0.5 * s2
return np.array([[h*dq[1], h*(dq[0]+dq[1])], [-h*dq[0], 0]])
def gravity_vector(self, q):
m1, m2 = self.robot.links[0].mass, self.robot.links[1].mass
L1, L2 = self.robot.links[0].length, self.robot.links[1].length
g, c1, c12 = self.robot.gravity, np.cos(q[0]), np.cos(q[0]+q[1])
G1 = m1*g*L1*0.5*c1 + m2*g*(L1*c1 + L2*0.5*c12)
G2 = m2*g*L2*0.5*c12
return np.array([G1, G2])
def forward_dynamics(self, q, dq, tau):
M = self.mass_matrix(q)
C = self.coriolis_matrix(q, dq)
G = self.gravity_vector(q)
return np.linalg.solve(M, tau - C @ dq - G)
Newton-Euler Verification Engine
class NewtonEulerDynamics:
def __init__(self, robot):
self.robot = robot
def compute_torques(self, q, dq, ddq):
m1, m2 = self.robot.links[0].mass, self.robot.links[1].mass
L1, L2 = self.robot.links[0].length, self.robot.links[1].length
g = self.robot.gravity
omega1, omega2 = dq[0], dq[0] + dq[1]
alpha1, alpha2 = ddq[0], ddq[0] + ddq[1]
r1, r2 = L1 * 0.5, L2 * 0.5
theta2 = q[0] + q[1]
a1_x = -r1 * omega1**2 * np.cos(q[0]) - r1 * alpha1 * np.sin(q[0])
a1_y = -r1 * omega1**2 * np.sin(q[0]) + r1 * alpha1 * np.cos(q[0])
a_joint2_x = -L1 * omega1**2 * np.cos(q[0]) - L1 * alpha1 * np.sin(q[0])
a_joint2_y = -L1 * omega1**2 * np.sin(q[0]) + L1 * alpha1 * np.cos(q[0])
a2_x = a_joint2_x - r2 * omega2**2 * np.cos(theta2) - r2 * alpha2 * np.sin(theta2)
a2_y = a_joint2_y - r2 * omega2**2 * np.sin(theta2) + r2 * alpha2 * np.cos(theta2)
F2_x = m2 * a2_x
F2_y = m2 * (a2_y + g)
tau2 = (self.robot.links[1].inertia * alpha2 +
F2_x * r2 * np.sin(theta2) - F2_y * r2 * np.cos(theta2))
F1_x = m1 * a1_x + F2_x
F1_y = m1 * (a1_y + g) + F2_y
tau1 = (self.robot.links[0].inertia * alpha1 +
F1_x * r1 * np.sin(q[0]) - F1_y * r1 * np.cos(q[0]) +
F2_x * L1 * np.sin(q[0]) - F2_y * L1 * np.cos(q[0]) + tau2)
return np.array([tau1, tau2])
Verification: Do They Match?
def verify_dynamics_consistency(robot, num_tests=100):
lag = LagrangianDynamics(robot)
rne = NewtonEulerDynamics(robot)
max_error = 0
for _ in range(num_tests):
q = np.random.uniform(-np.pi, np.pi, 2)
dq = np.random.uniform(-2, 2, 2)
ddq = np.random.uniform(-5, 5, 2)
tau_lag = lag.mass_matrix(q) @ ddq + lag.coriolis_matrix(q, dq) @ dq + lag.gravity_vector(q)
tau_rne = rne.compute_torques(q, dq, ddq)
error = np.max(np.abs(tau_lag - tau_rne))
max_error = max(max_error, error)
print(f"Max torque discrepancy over {num_tests} random tests: {max_error:.2e} N·m")
assert max_error < 1e-10, "Dynamics mismatch detected!"
print("✓ Lagrangian and Newton-Euler produce identical results")
return max_error
verify_dynamics_consistency(arm)
Energy Conservation Check
def compute_total_energy(robot, q, dq):
"""Compute T + V for the 2-DOF arm"""
lag = LagrangianDynamics(robot)
M = lag.mass_matrix(q)
T = 0.5 * dq.T @ M @ dq
m1, m2 = robot.links[0].mass, robot.links[1].mass
L1, L2 = robot.links[0].length, robot.links[1].length
g = robot.gravity
h1 = L1 * 0.5 * np.sin(q[0])
h2 = L1 * np.sin(q[0]) + L2 * 0.5 * np.sin(q[0]+q[1])
V = m1 * g * h1 + m2 * g * h2
return T + V
def check_energy_conservation(robot, q0, dq0, duration=5.0, dt=0.001):
"""Simulate free fall and verify energy conservation"""
lag = LagrangianDynamics(robot)
q, dq = q0.copy(), dq0.copy()
times = []
energies = []
for i in range(int(duration / dt)):
tau = np.zeros(robot.n_dof) # No actuation
ddq = lag.forward_dynamics(q, dq, tau)
dq += ddq * dt
q += dq * dt
if i % 10 == 0:
times.append(i * dt)
energies.append(compute_total_energy(robot, q, dq))
E_initial = energies[0]
E_drift = [abs(e - E_initial) / E_initial * 100 for e in energies]
max_drift = max(E_drift)
print(f"Initial energy: {E_initial:.3f} J")
print(f"Max energy drift: {max_drift:.4f}%")
if max_drift < 1.0:
print("✓ Energy conserved within 1%")
else:
print("⚠ Energy drift detected — reduce dt or use better integrator")
return times, energies, E_drift
times, E, drift = check_energy_conservation(arm, np.array([0.5, 0.8]), np.array([0.0, 0.0]))
Full Simulation with Visualization
class RobotSimulator:
"""Complete dynamics simulation environment"""
def __init__(self, robot, controller=None, dt=0.001):
self.robot = robot
self.dynamics = LagrangianDynamics(robot)
self.controller = controller
self.dt = dt
self.history = {'t': [], 'q': [], 'dq': [], 'tau': [], 'E': []}
def step(self, q, dq, t):
"""Single simulation step"""
if self.controller:
tau = self.controller(q, dq, t)
else:
tau = np.zeros(self.robot.n_dof)
ddq = self.dynamics.forward_dynamics(q, dq, tau)
# Semi-implicit Euler integration
dq_new = dq + ddq * self.dt
q_new = q + dq_new * self.dt
return q_new, dq_new, tau
def run(self, q0, dq0, duration):
"""Run full simulation"""
q, dq = q0.copy(), dq0.copy()
steps = int(duration / self.dt)
for i in range(steps):
t = i * self.dt
q, dq, tau = self.step(q, dq, t)
if i % 100 == 0: # Record every 100 steps
E = compute_total_energy(self.robot, q, dq)
self.history['t'].append(t)
self.history['q'].append(q.copy())
self.history['dq'].append(dq.copy())
self.history['tau'].append(tau.copy())
self.history['E'].append(E)
return self.history
# Gravity compensation controller
def gravity_compensator(q, dq, t):
lag = LagrangianDynamics(arm)
return lag.gravity_vector(q)
# Run simulation
sim = RobotSimulator(arm, controller=gravity_compensator, dt=0.001)
history = sim.run(q0=np.array([0.5, 0.8]), dq0=np.array([0.5, -0.3]), duration=3.0)
print(f"Simulation complete: {len(history['t'])} recorded frames")
print(f"Final angles: q1={history['q'][-1][0]:.3f}, q2={history['q'][-1][1]:.3f}")
Trajectory Comparison
def compare_controllers(robot, q0, dq0, controllers, duration=3.0):
"""Compare multiple controllers side by side"""
results = {}
for name, ctrl in controllers.items():
sim = RobotSimulator(robot, controller=ctrl, dt=0.001)
hist = sim.run(q0, dq0, duration)
results[name] = hist
max_tau = np.max(np.abs(hist['tau']), axis=0)
print(f"{name}: max τ = {max_tau}")
return results
# Define controllers
controllers = {
'gravity_only': lambda q, dq, t: LagrangianDynamics(arm).gravity_vector(q),
'pd_gravity': lambda q, dq, t: (
LagrangianDynamics(arm).gravity_vector(q) +
50 * (np.array([1.0, 0.5]) - q) + 10 * (np.zeros(2) - dq)
),
'zero_torque': lambda q, dq, t: np.zeros(2)
}
results = compare_controllers(arm, np.array([0.0, 0.0]), np.array([0.0, 0.0]), controllers)
Key Takeaways
- Verification first: Always check that Lagrangian and Newton-Euler match before trusting either
- Energy conservation is the best sanity check for simulation correctness
- Semi-implicit Euler is simple but sufficient for most robotics simulations
- Gravity compensation alone stabilizes a robot at any pose but doesn’t track trajectories
- Simulation lets you iterate safely before deploying to hardware
Next Steps
Tomorrow, we’ll tackle adaptive and robust control — strategies for when the real robot doesn’t match your model. We’ll learn how to estimate unknown parameters online and reject unexpected disturbances.
Practice Exercise: Extend the simulator to a 3-DOF planar arm. Verify energy conservation and compare the computational cost of Lagrangian vs. recursive Newton-Euler as you increase from 2 to 6 DOF.
Disclaimer
For educational purposes only. This article is part of a structured learning curriculum and does not constitute professional engineering advice.