Week 05 | Day 04
Force Control and Impedance Control: Interacting with the World
Published: April 23, 2026 | Author: Smartotics Learning Journey | Reading Time: 14 min
TL;DR: Position control works in free space, but real robots touch things. Force control regulates contact forces directly. Impedance control shapes the robot’s dynamic relationship between position and force — making it behave like a mass-spring-damper system that adapts to its environment.
Why Position Control Fails at Contact
We’ve spent weeks on position control: “Go to point A, then point B.” This works beautifully in empty space. But what happens when the robot hits something?
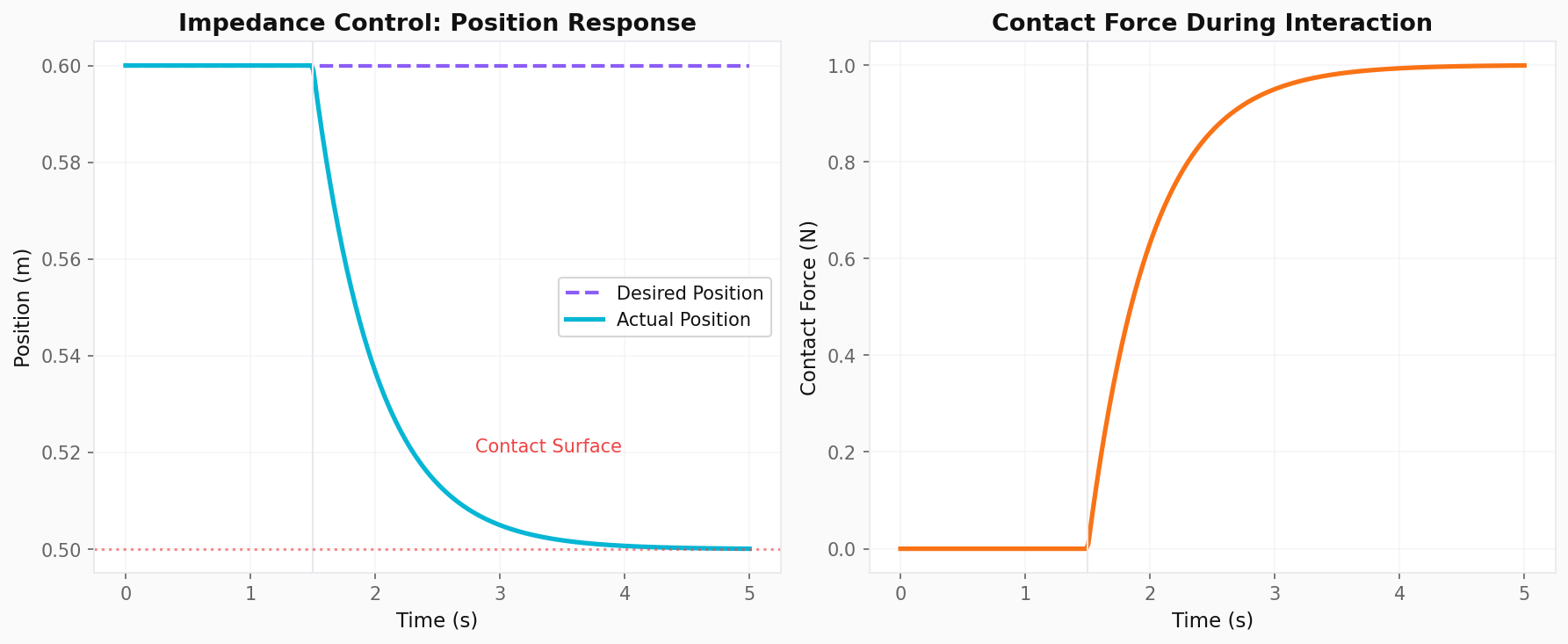
Scenario: A robot arm moves toward a surface at position x = 0.5 m.
- At
t = 1.5s, the end-effector makes contact - The position controller keeps commanding
x = 0.6m - The robot can’t reach 0.6 m — the surface blocks it
- Position error grows → controller increases force
- Result: The robot pushes harder and harder until something breaks
This is not a bug in the controller. It’s a fundamental mismatch between the control objective (position) and the physical reality (force-limited contact).
Force Control: Direct Force Regulation
The simplest solution: control force instead of position.
Direct Force Control Law
τ = Kf · (F_desired - F_measured)
Where Kf is the force control gain. But this has a critical problem:
In free space, force is always zero. If F_desired = 10N and the robot isn’t touching anything, the controller will accelerate indefinitely trying to generate 10N of contact force.
Better: Force Control with Inner Position Loop
import numpy as np
class ForceController:
"""
Hybrid force/position controller with inner position loop
"""
def __init__(self, Kp_pos, Kd_pos, Kf, force_axis):
"""
Args:
Kp_pos: Position PD gains
Kd_pos: Velocity damping gains
Kf: Force control gain
force_axis: Direction of force control (unit vector)
"""
self.Kp_pos = np.array(Kp_pos)
self.Kd_pos = np.array(Kd_pos)
self.Kf = Kf
self.force_axis = np.array(force_axis)
# Integral term for force (reduces steady-state error)
self.force_integral = 0.0
self.Ki_f = 0.5
def control(self, x, dx, F_measured, x_desired, F_desired, dt):
"""
Compute control command
Args:
x: Current position [3]
dx: Current velocity [3]
F_measured: Measured contact force (scalar, along force_axis)
x_desired: Desired position [3]
F_desired: Desired contact force (scalar)
dt: Time step
Returns:
Desired end-effector wrench [6] (force + torque)
"""
# Position error
x_err = x_desired - x
dx_err = -dx
# Force error
F_err = F_desired - F_measured
self.force_integral += F_err * dt
self.force_integral = np.clip(self.force_integral, -10.0, 10.0) # Anti-windup
# Decompose position error into constrained and free directions
# Constrained direction (force-controlled): project out force_axis
pos_free = x_err - np.dot(x_err, self.force_axis) * self.force_axis
vel_free = dx_err - np.dot(dx_err, self.force_axis) * self.force_axis
# Position control in free directions
F_pos = self.Kp_pos * pos_free + self.Kd_pos * vel_free
# Force control in constrained direction
F_force = (self.Kf * F_err + self.Ki_f * self.force_integral) * self.force_axis
# Total force command
F_cmd = F_pos + F_force
return F_cmd
# Example: Polishing a surface
controller = ForceController(
Kp_pos=[100.0, 100.0, 100.0],
Kd_pos=[20.0, 20.0, 20.0],
Kf=2.0,
force_axis=[0, 0, 1] # Control force along Z (normal to surface)
)
# Simulate contact
x = np.array([0.5, 0.3, 0.5]) # Current position
dx = np.array([0.0, 0.0, -0.1]) # Moving toward surface
F_measured = 5.0 # Already in contact with 5N
x_desired = np.array([0.5, 0.3, 0.5]) # Stay at this XY position
F_desired = 10.0 # Want 10N contact force
F_cmd = controller.control(x, dx, F_measured, x_desired, F_desired, dt=0.001)
print(f"Force command: {F_cmd}")
print(f"Expected: small XY correction + increased Z push")
Impedance Control: The Gold Standard
Force control regulates force. Impedance control regulates the relationship between force and position. It makes the robot behave like a physical system with programmable mass, spring, and damper properties.
Mechanical Impedance Analogy
Imagine pushing on a robot. With impedance control, it feels like pushing on a virtual mass-spring-damper:
F = M·(ẍ_desired - ẍ) + B·(ẋ_desired - ẋ) + K·(x_desired - x)
Where:
M: Virtual mass (inertia)B: Virtual damping (energy dissipation)K: Virtual stiffness (spring constant)
Key insight: The robot doesn’t track position or force directly. It tracks a dynamic relationship between them.
Impedance Control Implementation
class ImpedanceController:
"""
Cartesian impedance controller for robot end-effector
"""
def __init__(self, M_virtual, B_virtual, K_virtual, null_space_gains=None):
"""
Args:
M_virtual: Virtual mass matrix [3x3] or scalar
B_virtual: Virtual damping matrix [3x3] or scalar
K_virtual: Virtual stiffness matrix [3x3] or scalar
null_space_gains: Optional joint-space damping for redundancy
"""
self.M = np.atleast_1d(M_virtual)
self.B = np.atleast_1d(B_virtual)
self.K = np.atleast_1d(K_virtual)
# Ensure matrices
if self.M.ndim == 1:
self.M = np.diag(self.M)
if self.B.ndim == 1:
self.B = np.diag(self.B)
if self.K.ndim == 1:
self.K = np.diag(self.K)
def compute_desired_force(self, x, dx, x_desired, dx_desired, ddx_desired):
"""
Compute desired end-effector force from impedance law
F = M·(ẍ_d - ẍ) + B·(ẋ_d - ẋ) + K·(x_d - x)
"""
pos_err = x_desired - x
vel_err = dx_desired - dx
accel_err = ddx_desired - np.zeros_like(x) # We don't measure acceleration directly
F = (self.M @ accel_err + self.B @ vel_err + self.K @ pos_err)
return F
def compute_joint_torques(self, x, dx, x_desired, dx_desired, ddx_desired,
jacobian, dq):
"""
Convert Cartesian impedance force to joint torques
τ = Jᵀ · F_impedance + (I - Jᵀ·J⁺ᵀ)·τ_null
"""
# Cartesian impedance force
F = self.compute_desired_force(x, dx, x_desired, dx_desired, ddx_desired)
# Primary task: impedance
tau_task = jacobian.T @ F
# Null-space damping (optional, for stability)
if hasattr(self, 'null_space_gains'):
J_pinv = np.linalg.pinv(jacobian)
P = np.eye(len(dq)) - jacobian.T @ J_pinv.T
tau_null = -self.null_space_gains * dq
tau_task += P @ tau_null
return tau_task
# Example: Soft interaction controller
soft_controller = ImpedanceController(
M_virtual=[5.0, 5.0, 5.0], # Low virtual mass
B_virtual=[50.0, 50.0, 50.0], # Moderate damping
K_virtual=[100.0, 100.0, 100.0] # Low stiffness (compliant)
)
# Example: Stiff precision controller
stiff_controller = ImpedanceController(
M_virtual=[20.0, 20.0, 20.0],
B_virtual=[200.0, 200.0, 200.0],
K_virtual=[2000.0, 2000.0, 2000.0] # High stiffness (precise)
)
Hybrid Position/Force Control
Many tasks require position control in some directions and force control in others:
| Task | Position-Controlled | Force-Controlled |
|---|---|---|
| Writing on paper | Pen tip XY motion | Pen pressure (Z) |
| Inserting a peg | Peg alignment (XY) | Insertion force (Z) |
| Polishing a surface | Tool path (XY) | Normal force (Z) |
| Walking | Foot placement (XY) | Ground reaction (Z) |
Selection Matrix Approach
class HybridController:
"""
Hybrid position/force controller using selection matrices
"""
def __init__(self, S, Kp, Kd, Kf, Ki_f):
"""
Args:
S: Selection matrix (1 for force-controlled, 0 for position)
Kp, Kd: Position control gains
Kf, Ki_f: Force control gains
"""
self.S = np.diag(S) # Force selection
self.I_S = np.eye(len(S)) - self.S # Position selection
self.Kp = np.diag(Kp)
self.Kd = np.diag(Kd)
self.Kf = Kf
self.Ki_f = Ki_f
self.force_integral = np.zeros(len(S))
def control(self, x, dx, F, x_des, F_des, dt):
"""
Compute hybrid control command
"""
# Position-controlled subspace
x_err = x_des - x
dx_err = -dx
F_pos = self.I_S @ (self.Kp @ x_err + self.Kd @ dx_err)
# Force-controlled subspace
F_err = F_des - F
self.force_integral += F_err * dt
self.force_integral = np.clip(self.force_integral, -5, 5)
F_force = self.S @ (self.Kf * F_err + self.Ki_f * self.force_integral)
return F_pos + F_force
# Example: Polishing (XY position, Z force)
S = [0, 0, 1] # Z is force-controlled
hybrid = HybridController(
S=S,
Kp=[200, 200, 0],
Kd=[40, 40, 0],
Kf=3.0,
Ki_f=1.0
)
x = np.array([0.5, 0.3, 0.51])
dx = np.array([0.1, 0.05, 0.0])
F = np.array([0, 0, 8.0])
x_des = np.array([0.5, 0.3, 0.5])
F_des = np.array([0, 0, 10.0])
F_cmd = hybrid.control(x, dx, F, x_des, F_des, dt=0.001)
print(f"Hybrid command: {F_cmd}")
print(f"XY: position control, Z: force control")
Admittance Control: The Dual of Impedance
Impedance control: measure position → compute force → command torque Admittance control: measure force → compute position → command position
Admittance control is preferred when:
- The robot has a fast, stiff inner position loop
- Force sensors are noisy (position filtering smooths the response)
- You want to trade off force bandwidth for position accuracy
class AdmittanceController:
"""
Admittance controller: force input → position output
"""
def __init__(self, M, B, K, dt):
self.M = M
self.B = B
self.K = K
self.dt = dt
# Virtual state
self.x_virtual = np.zeros(3)
self.dx_virtual = np.zeros(3)
def update(self, F_ext, x_desired):
"""
Update virtual position based on external force
M·ẍ_v + B·ẋ_v + K·(x_v - x_desired) = F_ext
"""
# Compute virtual acceleration
pos_err = self.x_virtual - x_desired
ddx = (F_ext - self.B * self.dx_virtual - self.K * pos_err) / self.M
# Integrate virtual state
self.dx_virtual += ddx * self.dt
self.x_virtual += self.dx_virtual * self.dt
return self.x_virtual
# Example: Human-robot collaboration
admittance = AdmittanceController(M=10.0, B=100.0, K=50.0, dt=0.001)
# Human pushes robot with 20N
F_human = np.array([20.0, 0, 0])
x_desired = np.array([0.5, 0.3, 0.4])
# Robot complies and moves
x_compliant = admittance.update(F_human, x_desired)
print(f"Compliant position: {x_compliant}")
print(f"Displacement: {x_compliant - x_desired}")
Choosing the Right Interaction Strategy
| Controller | Best For | Avoid When |
|---|---|---|
| Position control | Free-space motion, precision tasks | Contact tasks, uncertain environments |
| Force control | Grinding, polishing, insertion | Free-space motion, fast trajectories |
| Impedance control | Human-robot interaction, assembly | Very stiff contact (instability risk) |
| Admittance control | Industrial robots with stiff loops | Low-bandwidth force sensing |
| Hybrid control | Tasks with natural position/force decomposition | Complex contact geometries |
Key Takeaways
- Position control fails at contact because it cannot regulate contact forces
- Force control directly regulates contact forces but needs careful handling in free space
- Impedance control shapes the robot’s dynamic behavior like a programmable mass-spring-damper
- Hybrid control assigns different directions to position and force control based on task geometry
- Admittance control is the dual of impedance and works well with stiff industrial position controllers
- Stability is the primary challenge: contact introduces nonlinearity that can cause oscillation
Next Steps
Week 5 concludes tomorrow with a comprehensive summary. We’ll review all dynamics concepts, connect them to control strategies, and preview Week 6’s exploration of robot perception and sensing.
Practice Exercise: Implement a complete peg-in-hole insertion simulation using hybrid position/force control. The peg must align in XY (position control) while maintaining 5N insertion force in Z. Add position uncertainty (±2mm) and show that force control in Z prevents jamming while position control in XY achieves alignment.
Disclaimer
For educational purposes only. This article is part of a structured learning curriculum and does not constitute professional engineering advice.